
133-9715-0449 (王经理)
181-1418-8933 (宋经理)
·可靠品质 ·优异性能 ·支持定制常州市蓝冠鼎
133-9715-0449 (王经理)
181-1418-8933 (宋经理)
·可靠品质 ·优异性能 ·支持定制






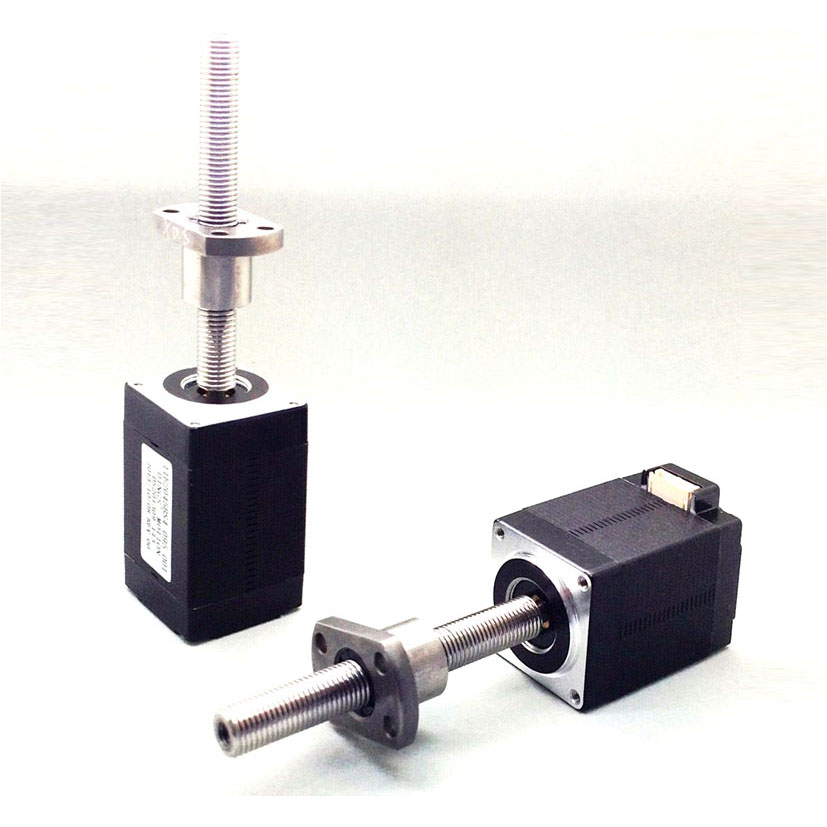
一般来说真空步进电机,其内部含有的转子都是由硅钢片叠加而成的,并且在转子上面还含有6个不同的磁极,其中每隔两个相对的磁极都会缠绕着同一个相绕,组三项绕组成一个星星的形状,作为真空步进电机的控制机组,其中转子的铁芯上并没有绕组,只有4个此其中齿的宽度相当于定子的宽度。接下来小编就跟大家详细的介绍一下,真空步进电机的主要构造以及其加减速过程中所应用的控制技术。
如今真空步进电器被人们广泛的应用在各行各业,所以说人们对于控制真空步进电机的研究也变得越来越多,特别是如果在启动或者是加速的过程中,由于脉冲数据变化过快的话,转子就会由于惯性的作用而导致跟不上电信号的变化程度,进而导致堵转,或者是在减速停止的过程中,由于同一个原因可能产生超步,为了避免这些现象,从而提高生产以及工作的效率,人们要对真空步进电机的升降速进行严格的控制。
要知道真空步进电机它的转动速度实际上是取决于输入的脉冲频率、拍数以及转子的齿数,所以说在确保这些参数在一定的情况之下,只需要严格控制脉冲的频率,就能够获得我们所需要的速度。同时由于真空部件电机是借助它的同步力矩而启动的,所以为了能够避免启动的频率过低,所以转子的直径要控制在一定的范围之内,而且要有一个固定的启动过程,那是由低速转到高速同时频率还不能直接降低为0,要有一个高速往低速在降低到0的一个过程。
由于其力矩越小,那么带动负载的能力就会变差,所以说在启动的时候要避免过充,关键要在加速度的过程之中,使得其力矩能够充分地利用各个运行的频率。目前很多地区对于真空步进电机的控制速度进行了大量的研究,而且建立了很多的模型,甚至在这些基础上设计了很多的控制电路,从而改变了真空步进电机它的运动特性,使得其速度控制打到一个比较精准的程度之上。
常州市蓝冠鼎
专注IVD核心模块运控控制
 left: 85px;
top: -109px;">
left: 85px;
top: -109px;">
联系我们